Cesium系列(7)--方位角测量
Cesium方位角测量(仿火星科技)
接着之前的通用工具介绍来讲,今天主要介绍方位角测量。仿照火星科技的例子实现,可以连续测量。先上图:
原理
首先明白什么是方位角,百度百科介绍:
方位角,又称地平经度(Azimuth angle,缩写为Az),是在平面上量度物体之间的角度差的方法之一。是从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角。
从定义中得到几个关键信息:
- 两个点, 起点和目标点
- 两点间顺时针的水平夹角
根据上面的信息,想到的方法就是,根据起点建立一个 x东方向,y为北方向的局部坐标系(或者y为东,x为北),计算出目标点在这个坐标系的局部坐标值,然后利用三角函数 arctan计算出夹角(图中角A的值)。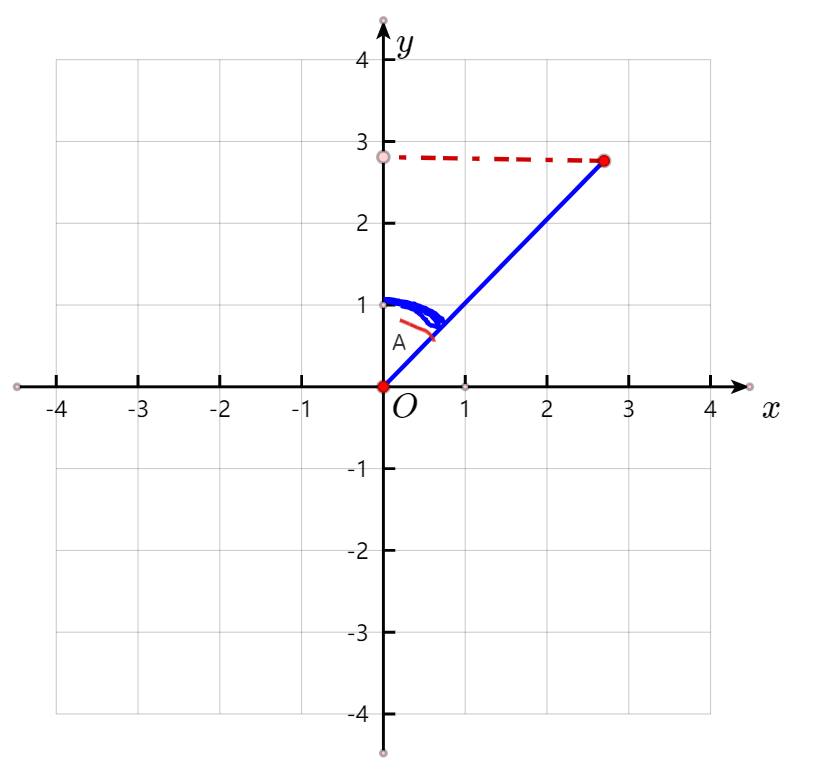
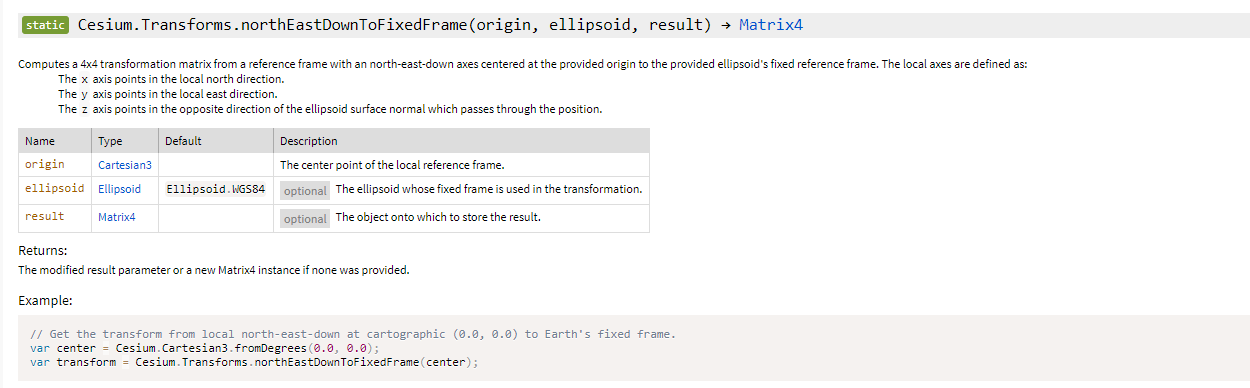
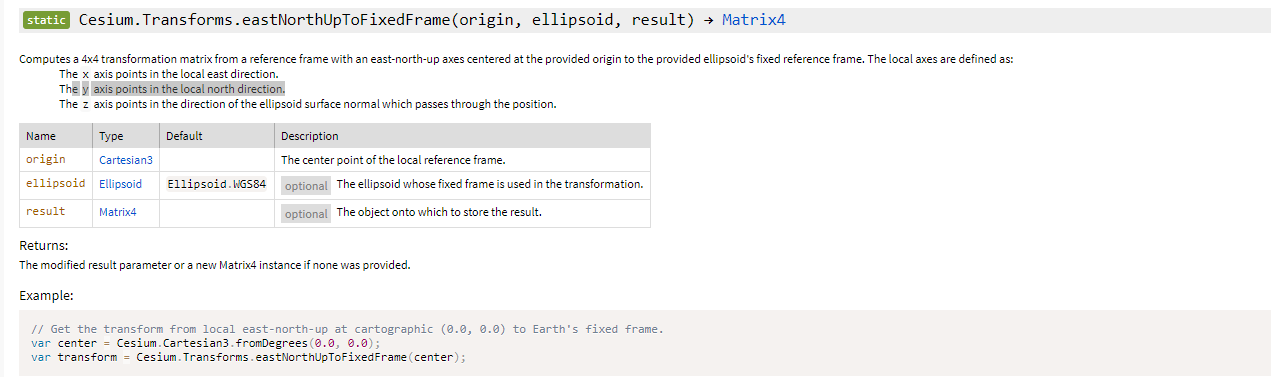
Cesium 中提供了建立局部坐标系的方法
- 以x为北,y东的局部坐标系

- 以y为北,x东的局部坐标系
实现
核心代码如下:
/** |
我是按照以x轴为东方向,y为北方向为局部坐标系建立的(另一种方向的计算也写了出来,请自行查看)。主要就是弧度计算的时候,是以 △y 为对边 还是以 △x 为对边求来结果。
天不生我李淳罡,剑道万古如长夜
代码
完整代码都放到 github 上,需要的移步Cesium-demo-view
音乐小憩
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Jercky!
- 微信
- 支付宝


相关推荐



评论